- Home
- Hochschule
-
Studium
- Studienangebote
-
Beratung
- Studienorientierung
- Zentrale Studienberatung
- Studienfachberatung
- Psychosoziale Beratung
- Studienfinanzierungsberatung und Stipendien
- Schreibberatung
- Studieren mit beruflicher Qualifikation
- Studieren mit ausländischen Zeugnissen
- Studieren mit Handicap
- Studieren mit Familie
- Informationen für Schulen
- Auslandsaufenthalt
-
Bewerbung
- Auswahlgrenzen und Vergabeverfahren (NC)
- Bewerbungsportal
- Bewerbung Schritt für Schritt: Von der Bewerbung bis zur Einschreibung
- Bewerbung für ein höheres Fachsemester
- Bewerbung mit beruflicher Qualifikation
- Gasthörerschaft und Zweithörerschaft
- Kontakt Studierendenservice
- Losverfahren
- Promotion
- Sonderanträge
- Studiengang wählen
- Wer kann an der HSBI studieren?
- Studienstart
-
Studium organisieren
- Studierendenservice
- Abschlussunterlagen
- Anerkennung von Leistungen
- Anträge einreichen
- Beurlaubung
- CampusCard
- Einreichung schriftliche Arbeiten
- Exmatrikulation
- IT-Services
- Online-Serviceportale (LSF/CAT)
- Prüfungsangelegenheiten: Ordnungen, Modulhandbücher
- Rücktritt von einer Modulprüfung
- Rückmeldung
- Semesterbeitrag
- Semesterticket (Studi-Deutschlandticket)
- Semester- und Vorlesungszeiten
- Studienbezogene Auslandserfahrung
- Studiengebühren
- Vorlesungsverzeichnis
- Rund ums Studium
- Fachbereiche
- Forschung
- Transfer
- Weiterbildung
- Internationales
- Karriere an der HSBI
- Hochschule
- Studium
- Studium
- Studienangebote
-
Beratung
- Studienorientierung
- Zentrale Studienberatung
- Studienfachberatung
- Psychosoziale Beratung
- Studienfinanzierungsberatung und Stipendien
- Schreibberatung
- Studieren mit beruflicher Qualifikation
- Studieren mit ausländischen Zeugnissen
- Studieren mit Handicap
- Studieren mit Familie
- Informationen für Schulen
- Auslandsaufenthalt
-
Bewerbung
- Auswahlgrenzen und Vergabeverfahren (NC)
- Bewerbungsportal
- Bewerbung Schritt für Schritt: Von der Bewerbung bis zur Einschreibung
- Bewerbung für ein höheres Fachsemester
- Bewerbung mit beruflicher Qualifikation
- Gasthörerschaft und Zweithörerschaft
- Kontakt Studierendenservice
- Losverfahren
- Promotion
- Sonderanträge
- Studiengang wählen
- Wer kann an der HSBI studieren?
- Studienstart
-
Studium organisieren
- Studierendenservice
- Abschlussunterlagen
- Anerkennung von Leistungen
- Anträge einreichen
- Beurlaubung
- CampusCard
- Einreichung schriftliche Arbeiten
- Exmatrikulation
- IT-Services
- Online-Serviceportale (LSF/CAT)
- Prüfungsangelegenheiten: Ordnungen, Modulhandbücher
- Rücktritt von einer Modulprüfung
- Rückmeldung
- Semesterbeitrag
- Semesterticket (Studi-Deutschlandticket)
- Semester- und Vorlesungszeiten
- Studienbezogene Auslandserfahrung
- Studiengebühren
- Vorlesungsverzeichnis
- Rund ums Studium
- Fachbereiche

- Forschung
- Transfer
- Weiterbildung
- Internationales
- Karriere an der HSBI
AG Eingebettete Systeme und Biomechatronik
Embedded Systems and Biomechatronics
Forschungsfeld
Die Arbeitsgruppe beschäftigt sich im Teilbereich Embedded Systems mit dem Einsatz von eingebetteten Rechnern und SOC-Systemen in verschiedenen Anwendungsszenarien. Diese reichen von der schnellen, digitalen Signalverarbeitung und -darstellung bis hin zu hochintegrierten Antriebselektroniken für die Robotik- und zukünftige Prothetikanwendungen.Im Teilbereich Biomechatronik beschäftigt sich die Arbeitsgruppe mit der Abstraktion und Umsetzung von Erkenntnissen, die an Vorbildern aus der belebten Natur gewonnen werden, in technische Produkte. Hierbei spielen gegenwärtig Fragestellungen im Bereich der elastischen Bewegungssysteme (Robotik) und aktive, elektrische Sensoren in Fluiden (Sensorik) eine zentrale Rolle.
Eingebettete Systeme
Beispiel Motorelektronik, Digitaloszilloskop, SOCs mit aktiven Filtern
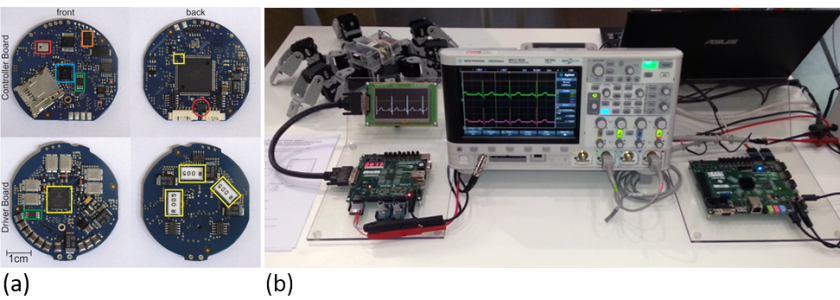
Die Abbildung zeigt in (a) eine miniaturisierte Motorelektronik für die Integration in Roboterantriebe. Die Platinen (Treiberboard und Controllerboard) enthalten Leistungselektronik und Steuerelektronik für die Kommutierung des bürstenlosen Motors sowie weitere integrierte Sensoren (farbige Kästchen) zur Messung von Temperatur, Körperschall, 3D-Lage und -Orientierung und elektrischer Ströme. Ebenfalls integriert ist ein spezielles, serielles Bussystem. (b) zeigt links neben dem Oszilloskop einen FPGA-Aufbau zur schnellen Bilderzeugung für den Einsatz in Digitaloszilloskopen. Rechts neben dem Oszilloskop befindet sich ein SOC-System, auf dem schnelle Digitalfilter implementiert sind.
Biomechatronik
Beispiel Bioinspirierte Elektrorezeptorsysteme zur Navigation in Fluiden
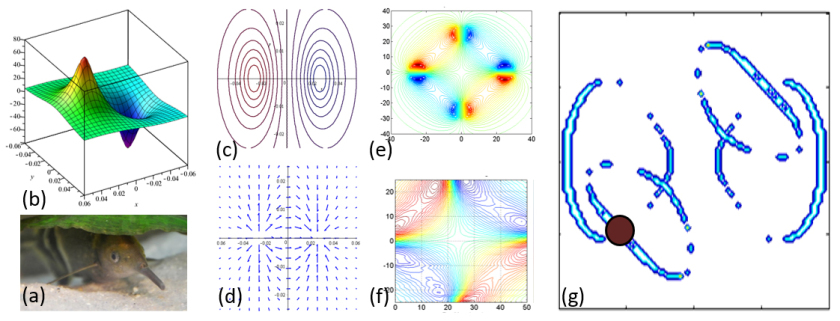
Die Abbildung zeigt in (a) einen Elefantenrüsselfisch. Dieser erzeugt mit Hilfe spezialisierter Muskelzellen im Schwanz ein elektrisches Dipolfeld, das sich auch außerhalb des Fischkörpers ausprägt. Der Fisch nimmt das selbsterzeugt Feld mittels tausender Elektrorezeptoren auf seiner Haut war. (b) zeigt exemplarisch einen entsprechenden, elektrischen Dipol, (c) die Darstellung der Equipotentiallinien und (d) das Gradientenfeld. Objekte in der Nähe des Fisches verzerren das aktiv erzeugte elektrische Feld. Diese Feldverzerrungen und daraus resultierende Messungen können simuliert (e) und mittels geeigneter Aufbauten auch gemessen werden (f). Aus den verschiedenen Messungen soll dann z.B. die Lage eines Objekts (g) abgeschätzt werden (Beispielobjekt am Ort des braunen gefüllten Kreises). Das beschriebene Konzept soll in einen technisch nutzbaren Sensor umgesetzt werden.
Biomechatronik
Beispiel Robotik, elastische Robotik
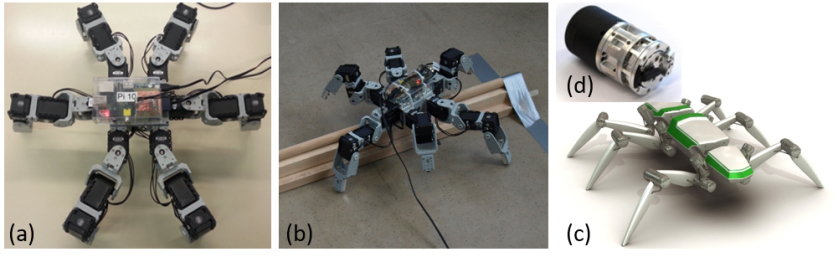
Die Abbildung zeigt in (a) die Draufsicht auf einen sechsbeinigen Roboter, der mit einem Raspberry Pi Computer ausgestattet ist. Auf dem System wird die Erzeugung von Laufverhalten auf Basis von dezentralen Steuerungsstrategien erprobt. (b) zeigt den Roboter beim Übersteigen eines Hindernisses. (c) zeigt die Designzeichnung des Laufroboters HECTOR, der vom Leiter der AG zusammen mit Kollegen an der Universität Bielefeld betrieben wird. Dieses System basiert auf 18 selbstentwickelten, elastischen Antrieben (d).
Biomechatronik
Beispiel Aktive Störschallkompensation
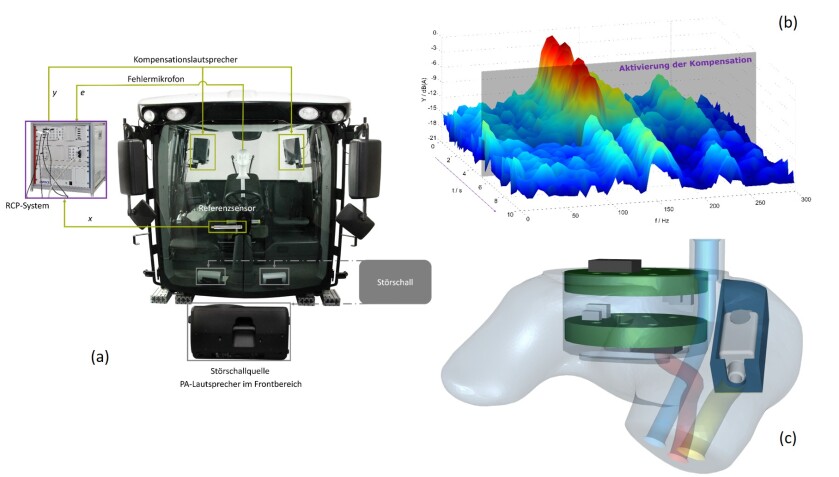
Die Abbildung (a) zeigt den Aufbau eines Prüfstandes zur aktiven Störschallkompensation in Fahrzeugen am Beispiel der Fahrerkabine eines Feldhäckslers. Die Entwicklung der adaptiven Kompensationsalgorithmen geschieht hierbei modellbasiert in MATLAB/Simulink, wobei diese in Echtzeit auf einem Rapid-Control-Prototyping-System ausgeführt werden. Abbildung (b) zeigt das entsprechende Spektrogramm des Kabinenschalls vor und nach der Aktivierung der Störschallkompensation. In Abbildung (c) ist der CAD-Entwurf einer aktiven Gehörschutz-Otoplastik dargestellt. Die am Kabinen-Prüfstand entwickelten Verfahren werden hierbei auf ein mikromechatronisches System übertragen, welches im menschlichen Gehörgang getragen werden kann und hier aktiv die Schallbelastung durch äußere Lärmquellen auf das Trommelfell reduziert.
Beteiligung an Laboren, Forschungsverbünden und Netzwerken
- ISyM
- MoRitS
- Labor für BioMechatronik und Eingebettete Systeme
- Labor für Angewandte Informatik
- Exzellenzcluster CITEC
- ELAN-Projekt
- BIOKON - Das Bionik-Kompetenznetz